

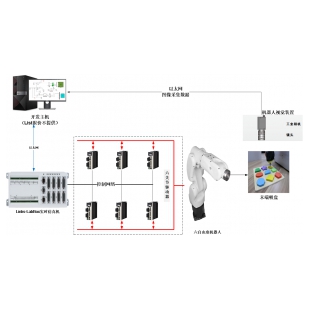
 硬件在回路HIL半實(shí)物實(shí)時仿真六自由度機(jī)器人半實(shí)物實(shí)驗(yàn)平臺
硬件在回路HIL半實(shí)物實(shí)時仿真六自由度機(jī)器人半實(shí)物實(shí)驗(yàn)平臺
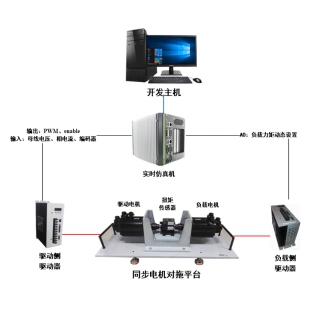
 硬件在回路實(shí)時仿真無人機(jī)飛控半實(shí)物實(shí)驗(yàn)平臺
硬件在回路實(shí)時仿真無人機(jī)飛控半實(shí)物實(shí)驗(yàn)平臺
 半實(shí)物仿真平臺
半實(shí)物仿真平臺
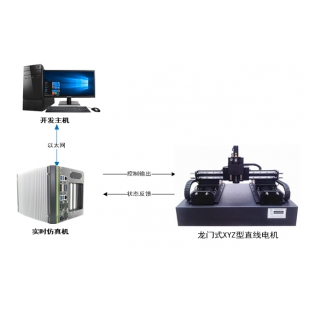
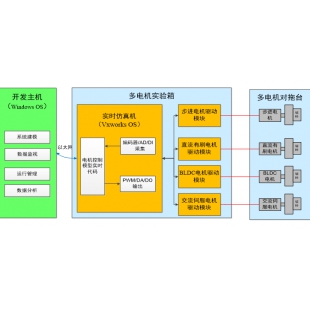 硬件在回路半實(shí)物實(shí)時仿真多電機(jī)控制半實(shí)物實(shí)驗(yàn)平臺
硬件在回路半實(shí)物實(shí)時仿真多電機(jī)控制半實(shí)物實(shí)驗(yàn)平臺
 硬件在回路HIL實(shí)時仿真桌面級六自由度機(jī)器人半實(shí)物實(shí)驗(yàn)平臺
硬件在回路HIL實(shí)時仿真桌面級六自由度機(jī)器人半實(shí)物實(shí)驗(yàn)平臺
室內(nèi)多智能體協(xié)同控制實(shí)驗(yàn)平臺
一、平臺概述
二、特征優(yōu)勢
采用室內(nèi)光學(xué)運(yùn)動捕捉技術(shù),定位范圍5m×5m(可定制擴(kuò)展),支持毫米級定位,能夠最多同時捕捉12架左右的無人機(jī)或無人車;
本平臺系統(tǒng)支持4架無人機(jī)及2臺無人車進(jìn)行編隊實(shí)驗(yàn)(被控對象數(shù)目可根據(jù)實(shí)驗(yàn)室具體情況擴(kuò)展);
可在MATLAB/Simulink軟件平臺上進(jìn)行的控制算法研究,支持自動生成代碼,通過無線WiFi下載到無人機(jī)飛控板及無人車控制板;
系統(tǒng)支持C、C++、python編程,適合有一定代碼開發(fā)能力的學(xué)生,進(jìn)一步錘煉代碼編程能力;
MATLAB/Simulink中提供了ROS的支持包,可實(shí)現(xiàn)Simulink控制模型到ROS系統(tǒng)代碼的自動生成,降低了ROS系統(tǒng)控制模型的開發(fā)難度,適合大眾化本科教學(xué)實(shí)驗(yàn)。
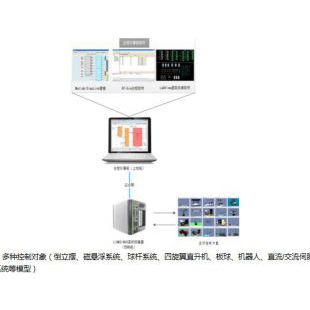
可用于無人工具的動態(tài)建模和控制研究、運(yùn)動規(guī)劃、避障控制、多信息融合、編隊控制、多智能體協(xié)調(diào)控制、無人工具自主控制等。
(1)基于Simulink數(shù)學(xué)仿真實(shí)驗(yàn)
??(2)定位系統(tǒng)實(shí)驗(yàn)
運(yùn)動捕捉系統(tǒng)定位實(shí)驗(yàn); 地面標(biāo)記定位實(shí)驗(yàn);
??? ??? ?(4)單車控制實(shí)驗(yàn)
硬件組成認(rèn)識; 基于激光SLAM的機(jī)器人的自主定位導(dǎo)航; 軟件開發(fā)環(huán)境學(xué)習(xí)和使用;
?(5)多機(jī)編隊飛行試驗(yàn)
基于運(yùn)動捕捉定位的多機(jī)編隊飛行實(shí)驗(yàn); 基于地面標(biāo)記定位的多機(jī)編隊飛行實(shí)驗(yàn)。
??(7)多智能體協(xié)同編隊實(shí)驗(yàn)
基于攝像捕捉定位的多車、多機(jī)編隊運(yùn)行實(shí)驗(yàn); 基于期望目標(biāo)任務(wù)的多車、多機(jī)編隊運(yùn)行實(shí)驗(yàn)。
產(chǎn)品名稱
系統(tǒng)配置 | ||
LINKS-RS-UAV/TB-01 | Links-UAV-LargeRealPlane | |
Links_BOT | ||
Links-AutoCoder | ||
Links-GCS | ||
Links-OptiCapture | ||
Links-MCTool | ||
實(shí)驗(yàn)示例包 | ROSLinks-ROS-Demo | |
?
上傳人:北京靈思創(chuàng)奇科技有限公司
大小:0 B
631
報價:面議
已咨詢817次半實(shí)物實(shí)時仿真機(jī)
報價:面議
已咨詢1173次半實(shí)物實(shí)時仿真機(jī)
報價:面議
已咨詢1006次半實(shí)物實(shí)時仿真機(jī)
報價:面議
已咨詢736次半實(shí)物實(shí)時仿真機(jī)
報價:面議
已咨詢1587次半實(shí)物實(shí)時仿真機(jī)

報價:面議
已咨詢1150次半實(shí)物實(shí)時仿真機(jī)
報價:面議
已咨詢774次半實(shí)物實(shí)時仿真機(jī)

報價:面議
已咨詢1094次半實(shí)物實(shí)時仿真機(jī)
一、產(chǎn)品概述 實(shí)時仿真機(jī)是一種嵌入式工業(yè)計算機(jī),具備豐富的I/O資源,并運(yùn)行嵌入式實(shí)時操作系統(tǒng)。面向不同的應(yīng)用場景,我公司提供多種類型的實(shí)時仿真機(jī)供用戶選擇。 二、特征優(yōu)勢 1、支持RCP快速原型設(shè)計 實(shí)現(xiàn)用戶的Matlab/Simulink仿真模型到嵌入式控制原型的自動轉(zhuǎn)換; 2、支持HIL硬件在回路測試 用戶的控制器等實(shí)物設(shè)備可以直接與Links-Box快速原型仿真器連接,動態(tài)驗(yàn)證實(shí)物控制器性能; 3、IO資源豐富 有大量的IO板卡資源供用戶選擇,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可選配型號多 可選配型號多:根據(jù)不同的應(yīng)用場景,有嵌入式單板設(shè)備、PCI/CPCI/PXIe等多種架構(gòu)設(shè)備供選擇。 三、硬件組成 實(shí)時仿真機(jī)有多種基本硬件配置,可根據(jù)用戶需求進(jìn)行定制。
一、產(chǎn)品概述 實(shí)時仿真機(jī)是一種嵌入式工業(yè)計算機(jī),具備豐富的I/O資源,并運(yùn)行嵌入式實(shí)時操作系統(tǒng)。面向不同的應(yīng)用場景,我公司提供多種類型的實(shí)時仿真機(jī)供用戶選擇。 二、特征優(yōu)勢 1、支持RCP快速原型設(shè)計 實(shí)現(xiàn)用戶的Matlab/Simulink仿真模型到嵌入式控制原型的自動轉(zhuǎn)換; 2、支持HIL硬件在回路測試 用戶的控制器等實(shí)物設(shè)備可以直接與Links-Box快速原型仿真器連接,動態(tài)驗(yàn)證實(shí)物控制器性能; 3、IO資源豐富 有大量的IO板卡資源供用戶選擇,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可選配型號多 可選配型號多:根據(jù)不同的應(yīng)用場景,有嵌入式單板設(shè)備、PCI/CPCI/PXIe等多種架構(gòu)設(shè)備供選擇。 三、硬件組成 實(shí)時仿真機(jī)有多種基本硬件配置,可根據(jù)用戶需求進(jìn)行定制。
一、產(chǎn)品概述 實(shí)時仿真機(jī)是一種嵌入式工業(yè)計算機(jī),具備豐富的I/O資源,并運(yùn)行嵌入式實(shí)時操作系統(tǒng)。面向不同的應(yīng)用場景,我公司提供多種類型的實(shí)時仿真機(jī)供用戶選擇。 二、特征優(yōu)勢 1、支持RCP快速原型設(shè)計 實(shí)現(xiàn)用戶的Matlab/Simulink仿真模型到嵌入式控制原型的自動轉(zhuǎn)換; 2、支持HIL硬件在回路測試 用戶的控制器等實(shí)物設(shè)備可以直接與Links-Box快速原型仿真器連接,動態(tài)驗(yàn)證實(shí)物控制器性能; 3、IO資源豐富 有大量的IO板卡資源供用戶選擇,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可選配型號多 可選配型號多:根據(jù)不同的應(yīng)用場景,有嵌入式單板設(shè)備、PCI/CPCI/PXIe等多種架構(gòu)設(shè)備供選擇。 三、硬件組成 實(shí)時仿真機(jī)有多種基本硬件配置,可根據(jù)用戶需求進(jìn)行定制。
一、產(chǎn)品概述 實(shí)時仿真機(jī)是一種嵌入式工業(yè)計算機(jī),具備豐富的I/O資源,并運(yùn)行嵌入式實(shí)時操作系統(tǒng)。面向不同的應(yīng)用場景,我公司提供多種類型的實(shí)時仿真機(jī)供用戶選擇。 二、特征優(yōu)勢 1、支持RCP快速原型設(shè)計 實(shí)現(xiàn)用戶的Matlab/Simulink仿真模型到嵌入式控制原型的自動轉(zhuǎn)換; 2、支持HIL硬件在回路測試 用戶的控制器等實(shí)物設(shè)備可以直接與Links-Box快速原型仿真器連接,動態(tài)驗(yàn)證實(shí)物控制器性能; 3、IO資源豐富 有大量的IO板卡資源供用戶選擇,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可選配型號多 可選配型號多:根據(jù)不同的應(yīng)用場景,有嵌入式單板設(shè)備、PCI/CPCI/PXIe等多種架構(gòu)設(shè)備供選擇。 三、硬件組成 實(shí)時仿真機(jī)有多種基本硬件配置,可根據(jù)用戶需求進(jìn)行定制。

實(shí)時仿真機(jī) 一、產(chǎn)品概述 實(shí)時仿真機(jī)是一種嵌入式工業(yè)計算機(jī),具備豐富的I/O資源,并運(yùn)行嵌入式實(shí)時操作系統(tǒng)。面向不同的應(yīng)用場景,我公司提供多種類型的實(shí)時仿真機(jī)供用戶選擇。 二、特征優(yōu)勢 1、支持RCP快速原型設(shè)計 實(shí)現(xiàn)用戶的Matlab/Simulink仿真模型到嵌入式控制原型的自動轉(zhuǎn)換; 2、支持HIL硬件在回路測試 用戶的控制器等實(shí)物設(shè)備可以直接與Links-Box快速原型仿真器連接,動態(tài)驗(yàn)證實(shí)物控制器性能; 3、IO資源豐富 有大量的IO板卡資源供用戶選擇,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可選配型號多 可選配型號多:根據(jù)不同的應(yīng)用場景,有嵌入式單板設(shè)備、PCI/CPCI/PXIe等多種架構(gòu)設(shè)備供選擇。 三、硬件組成 實(shí)時仿真機(jī)有多種基本硬件配置,可根據(jù)用戶需求進(jìn)行定制。
一、產(chǎn)品概述 實(shí)時仿真機(jī)是一種嵌入式工業(yè)計算機(jī),具備豐富的I/O資源,并運(yùn)行嵌入式實(shí)時操作系統(tǒng)。面向不同的應(yīng)用場景,我公司提供多種類型的實(shí)時仿真機(jī)供用戶選擇。 二、特征優(yōu)勢 1、支持RCP快速原型設(shè)計 實(shí)現(xiàn)用戶的Matlab/Simulink仿真模型到嵌入式控制原型的自動轉(zhuǎn)換; 2、支持HIL硬件在回路測試 用戶的控制器等實(shí)物設(shè)備可以直接與Links-Box快速原型仿真器連接,動態(tài)驗(yàn)證實(shí)物控制器性能; 3、IO資源豐富 有大量的IO板卡資源供用戶選擇,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可選配型號多 可選配型號多:根據(jù)不同的應(yīng)用場景,有嵌入式單板設(shè)備、PCI/CPCI/PXIe等多種架構(gòu)設(shè)備供選擇。 三、硬件組成 實(shí)時仿真機(jī)有多種基本硬件配置,可根據(jù)用戶需求進(jìn)行定制。
一、產(chǎn)品概述 實(shí)時仿真機(jī)是一種嵌入式工業(yè)計算機(jī),具備豐富的I/O資源,并運(yùn)行嵌入式實(shí)時操作系統(tǒng)。面向不同的應(yīng)用場景,我公司提供多種類型的實(shí)時仿真機(jī)供用戶選擇。 二、特征優(yōu)勢 1、支持RCP快速原型設(shè)計 實(shí)現(xiàn)用戶的Matlab/Simulink仿真模型到嵌入式控制原型的自動轉(zhuǎn)換; 2、支持HIL硬件在回路測試 用戶的控制器等實(shí)物設(shè)備可以直接與Links-Box快速原型仿真器連接,動態(tài)驗(yàn)證實(shí)物控制器性能; 3、IO資源豐富 有大量的IO板卡資源供用戶選擇,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可選配型號多 可選配型號多:根據(jù)不同的應(yīng)用場景,有嵌入式單板設(shè)備、PCI/CPCI/PXIe等多種架構(gòu)設(shè)備供選擇。 三、硬件組成 實(shí)時仿真機(jī)有多種基本硬件配置,可根據(jù)用戶需求進(jìn)行定制。
1、支持RCP快速原型設(shè)計 實(shí)現(xiàn)用戶的Matlab/Simulink仿真模型到嵌入式控制原型的自動轉(zhuǎn)換; 2、支持HIL硬件在回路測試 用戶的控制器等實(shí)物設(shè)備可以直接與Links-Box快速原型仿真器連接,動態(tài)驗(yàn)證實(shí)物控制器性能; 3、IO資源豐富 有大量的IO板卡資源供用戶選擇,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可選配型號多 可選配型號多:根據(jù)不同的應(yīng)用場景,有嵌入式單板設(shè)備、PCI/CPCI/PXIe等多種架構(gòu)設(shè)備供選擇。

關(guān)注微信公眾號

微信小程序
