
高精度中型六軸位移臺(六自由度機器人)
六軸位移臺產品簡介
六足位移臺是一種并聯運動平臺,可在六個自由度內移動、定位和對準負載:三個平移軸(X、Y、Z)和三個旋轉軸(ΘX、ΘY、ΘZ)。 六足位移臺(又稱Stewart平臺)的典型結構由六個長度可調的促動器組成,這些促動器通過關節連接到底板以及承載負載的運動平臺。 由于采用了并聯運動設計,六足位移臺可以執行復雜的多軸運動軌跡,并具有很高的重復精度、動態性和穩定性。 同時,其結構非常緊湊。
六自由度并聯運動設計使其比串聯運動系統更加緊湊、更具剛性,動態范圍更大,無移動電纜:更穩定、摩擦更小
無刷直流電機尤其適合高旋轉速度。能夠精確對其進行控制并確保高精度。由于無滑動接觸,可無磨損地平穩運行,因此能夠實現較長的使用壽命。
六軸位移臺產品圖片

六軸位移臺產品特點
行程達±50 毫米 / ±30度
負載容量達10公斤
重復精度達±0.2 微米
可提供真空兼容版本
速度達50 毫米/秒
成本低
貨期短
平均無故障時間:20000小時
六軸位移臺主要參數
參數 | 單位 | |
行程范圍 X,Y,Z | ±50, ±50, ±25 | mm |
行程范圍 θX,θY,θZ | ±15, ±15, ±30 | 度 |
X,Y 位移精度 | 3 | μm |
Z 位移精度 | 1 | μm |
θX,θY位移精度 | 15 | μrad |
θZ位移精度 | 40 | μrad |
X,Y反向間隙 | 1 | μm |
Z反向間隙 | 0.5 | μm |
θX,θY反向間隙 | 8 | μrad |
θZ 反向間隙 | 5 | μrad |
X,Y重復定位精度 | ±0.5 | μm |
Z重復定位精度 | ±0.2 | μm |
θX,θY重復定位精度 | ±2 | μrad |
θZ重復定位精度 | ±4 | μrad |
X,Y, Z速度上限 | 50 | mm/s |
θX,θY,θZ速度上限 | 600 | mrad/s |
X,Y, Z典型速度 | 30 | mm/s |
θX,θY,θZ典型速度 | 300 | mrad/s |
機械性能 | ||
負載(底板水平/任意方向) | 10/3 | Kg |
把持力,斷電(底板水平/任意方向) | 15/5 | N |
電機類型 | 永磁同步電機 | |
其它 | ||
工作溫度范圍 | -10~50 | ℃ |
材料 | 鋁 | |
質量 | 12KG | Kg |
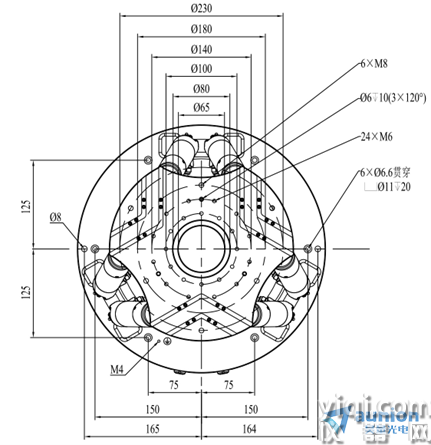
六軸位移臺圖紙尺寸

六軸位移臺主要應用
科研和工業. 用于運動仿真、刀具檢查、生命科學、微型制造
六足位移臺具有高精度、高穩定性的特點,因此在許多領域都有廣泛的應用。以下是一些典型的應用場景:
1. 機器人技術:六足位移臺可以作為機器人的執行器,實現機器人的精確移動和操作。例如,在工業生產線上,機器人可以使用六足位移臺來完成復雜的裝配任務;在醫療領域,機器人可以使用六足位移臺來進行微創手術等。
2. 航空航天:在航空航天領域,六足位移臺可以用于飛機、火箭等航天器的精確定位和姿態調整。例如,在航天器的組裝過程中,可以使用六足位移臺來實現航天器的精確對接;在航天器的維修過程中,可以使用六足位移臺來進行航天器的精確維修等。
3. 精密制造:在精密制造領域,六足位移臺可以用于加工和檢測精密零件。例如,在半導體制造過程中,可以使用六足位移臺來實現晶圓的精確切割和拼接;在光學元件制造過程中,可以使用六足位移臺來進行光學元件的精確加工和檢測等。
報價:面議
已咨詢34次精密定位平臺 | 顯微載物臺

報價:面議
已咨詢35次精密定位平臺 | 顯微載物臺

報價:面議
已咨詢836次精密定位平臺/掃描臺

報價:面議
已咨詢27次精密定位平臺 | 顯微載物臺

報價:面議
已咨詢33次精密定位平臺 | 顯微載物臺
報價:面議
已咨詢1758次表面成像

報價:面議
已咨詢118次多軸系統

報價:面議
已咨詢41次精密定位平臺 | 顯微載物臺










